igus® Robot Control Software: programme and control robots
Introduction to automation with the intuitive robot software as freeware
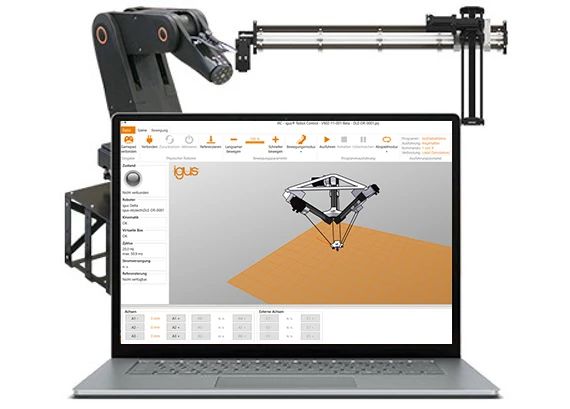
igus® Robot Control enables simple and intuitive robot programming and control and an easy entry into automation. Due to the modular design, different robot kinematics can be controlled, for example, delta robots, linear robots and multi-axis joint robots. The software can be used to simulate the individual movements of the robot on the 3D interface - the robot does not need to be connected for this step.- Simple connection between robot and controller
- Digital Twin enables direct execution and checking of the motion sequences
- Camera interface configuration directly via control system and software possible
- Programming of drylin® delta robots and drylin® linear robots, as well as robolink® DP articulated arm robots
- Free software enables risk-free testing
System requirements:
- PC with Windows 10 operating system
- Free USB 2.0 port, Ethernet port,
- 500 MB storage space
Try software now!
Defining robot commands with teach-in programming
For simple and complicated movements
The so-called "teach-in programming" of the robot takes place in the following steps:1. Move the robot manually to the desired positions that you want to register and save.
2. Register the positions and define how they should be moved (linear, joint motion, base orientation or tool orientation).
3. Repeat these steps until you have created the desired motion profile. You can also complete the programme with commands via digital inputs and outputs or programme flow commands. The integrated programme editor is available for setting up and editing the programmes. Try it for yourself.
System overview
The standard robot system consists of three components:
- Robot; depending on the application as articulated arm robot, delta robot or drylin® linear robot.
- Robot control system: as a switch cabinet or top-hat (DIN) rail version; the closed switch cabinet with integrated control system protects the control system from environmental influences such as dust or moisture, in addition a fan provides the necessary cooling.
- Control system software with graphical user interface and digital twin of the robot kinematics.
igus® Robot Control enables two system configurations as standard:
Configuration A:
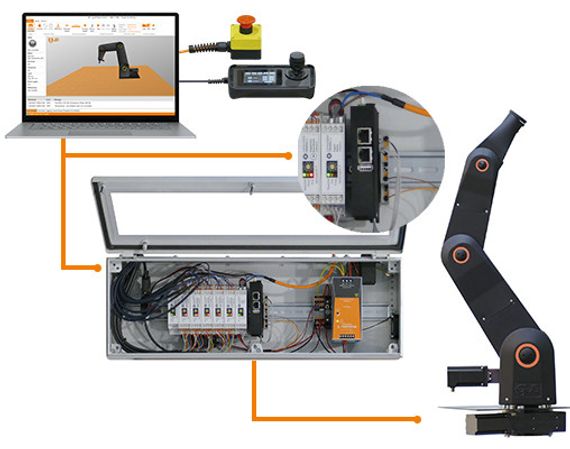
Robot control system programmable via a Windows PC, optionally with handheld display
The robot is controlled by a control element or alternatively by a Windows PC. The robot can be programmed via a graphical user interface. You can also connect a game pad to your Windows computer for the control system as an alternative to the handheld. With this version, the robot runs autonomously without the computer after programming via the Windows computer.Try software now
Achieve higher robot speeds with the igus® Robot Control

- drylin® linear robot: 0.5m/s or 500mm/s
- drylin® delta robot: 30 picks/min
- robolink® articulated arm robot: 0.1m/s or 100mm/s
Contact an expert for more information
Downloads
Operating instructions igus® Robot Control with robolink® DP
UserGuide_iRC_robolink.pdf
Operating instructions igus® Robot Control with drylin® linear robots
UserGuide_iRC_gantry.pdf
igus® Robot Control Command Preference
igus_Robot_Control_iRC_RZ_screen.pdf
System compatibility and data transfer for more flexibility
Plugin interface: igus Robot Control provides a plug-in interface. It makes it possible to connect, for example, image processing systems or PLC components. With various defined functions, the plug-ins represent a bridge between programme execution in the control system software and external systems. For example, integrated cameras can automatically transmit target positions to the robot control system. The plug-ins can be provided by igus®, or they can be created on a project-specific basis.PLC interface: The PLC interface (PLC = Programmable Logic Controller) allows the robot to be integrated into a production system controlled by a PLC. In most cases this is done via digital inputs and outputs. In this way, the robot can be controlled without manual interaction.
It is also possible to connect a third-party control panel to robots with a push button to simplify manual control.
Ethernet connection: the Ethernet connection of the modular control system enables the connection of the igus® Robot Control with application-specific algorithms, such as a teleoperation system or a database. This is guaranteed via a CRI Ethernet interface.

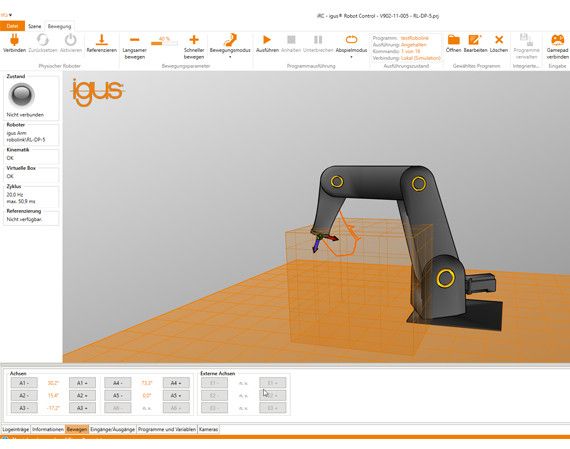
Virtual box
Programming assistance through definition of the permitted movement range
The virtual box settings limit the range of movement of the robot arm. This functionality helps to avoid mechanical damage and simplifies programming according to the application. If a programme is executed that violates the virtual box, it is stopped with an error message.Interfaces
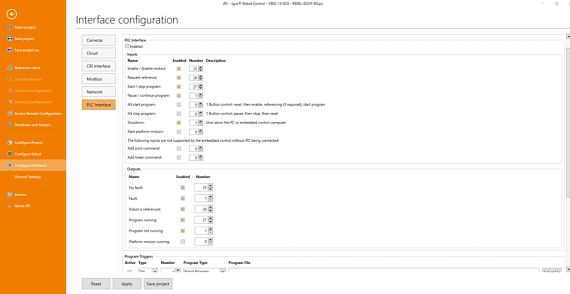
PLC interfaces
The PLC interface enables the execution of basic functions and the signalling of states by means of digital inputs and outputs. In addition to the control by a PLC, this interface also allows operation by hardware buttons.To the SPS Wiki
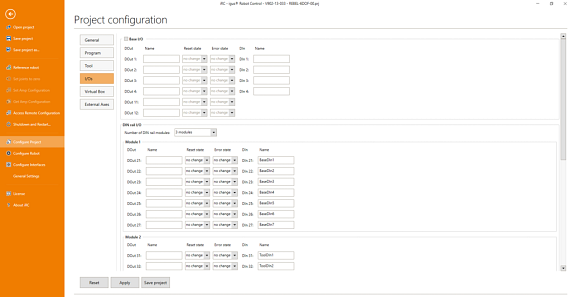
Digital inputs & outputs
Robot programs can be loaded and started and gripper commands can be sent via digital inputs or global signals. This is useful, for example, if a program is to be selected from a given selection using buttons or the CRI-GSig instruction.To the I/O Wiki
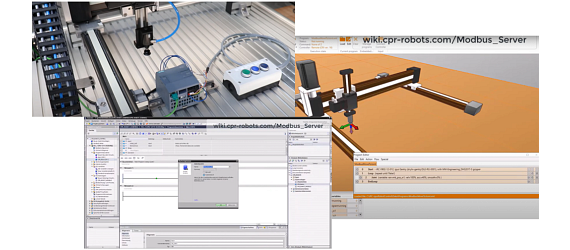
Modbus TCP/IP
For example, PLCs can send data and instructions to the robot control system and receive status information via the Modbus TCP interface.To the TCP/IP Wiki
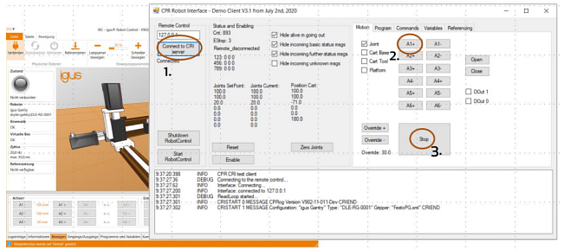
CRI interface
The CRI interface enables complex instructions to be sent and information and settings to be retrieved via the Ethernet interface via TCP/IP. iRC uses this interface to connect to robots with integrated control systems or other instances of iRC.To the CRI Wiki
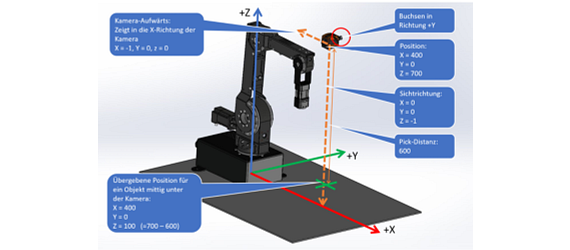
Camera interface
The camera interface allows the use of object detection and video cameras. Object detection cameras recognise the position and class of objects and transmit them, optionally with a video image, to the control system. The control system calculates positions in the robot coordinate system from the object positions of the camera. Pure video cameras only deliver images and can therefore only be used to observe the work area, but not for object detection.To the Wiki
Cloud
The Cloud interface enables the robot to be monitored via RobotDimension. After activation and login, the robot sends basic status information and camera images to the online service. On the website, the user can list his robots and call up the information.
ROS, Matlab, LabView, and many more.
Integrate the robots into your ROS environment. Documentation and packages for hardware communication, Teleop and moveITo the sample programs
Programs
Here you can set the robot and logic program, the movement speed (as a percentage of the maximum speed), the playback mode and the reaction to program errors.
