3D printed finger phalanxes in an exoskeleton
Eidgenössische Technische Hochschule Zurich (ETHZ university) developed a hand exoskeleton called RELab tenoexo. This can perform up to 80 per cent of everyday activities for stroke patients. 3D printed finger phalanges made of the iglidur® I6 high-performance plastic ensure optimum force transmission.
- What was needed: Finger joints for an exoskeleton
- Manufacturing method: Selective laser sintering with laser sintering powder
- Material: iglidur® I6
- Industry: Medical sector
- Success through collaboration: Fast delivery, cost-effective manufacture of customer-specific functional components
Contact an expert

Problem
The manufacture of finger joints with a classic 3D printer turned out to be difficult as the resolution of the device was not sufficient to create the required structure of the finger phalanxes. These components not only hold the leaf springs together but also have a filigree closing mechanism for a leather strap. The buckle into which the strap is threaded is barely wider than a millimetre. ABS filament as printing material turned out to be unsuitable because the friction between the joints and the leaf springs was too high, as a result of which a lot of energy was lost.Solution
ETH Zurich eventually discovered iglidur® I6, a tribologically optimised plastic that turned out to be ideal for the components needed. The SLS powder was specially developed in order to reduce the friction in moving applications Laser sintering enables high precision and thus makes it possible to create the filigree structure of the joint. Thanks to the fast 3D printing service of igus®, the finger joints were manufactured quickly and cost-effectively and were ready for use immediately.Structure of the hand exoskeleton and how it works
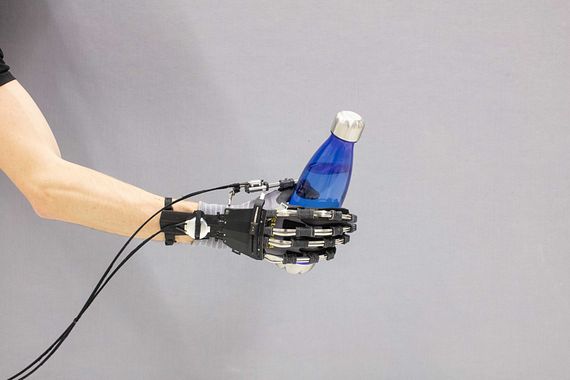
The design of the fingers comes from the Japanese professor Jumpei Arata of Kyushu University: three thin leaf springs made of stainless steel are placed one on top of the other and are connected by means of four plastic links. A Bowden cable is attached to the middle spring - If it is moved forwards, the fingers close; if it is pulled back, the hand opens. DC motors stretch and flex the leaf springs and bolster the patient when he/she makes grasping movements. "Per finger, the exoskeleton can exert the force of six Newton", says Jan Dittli, researcher at the ETHZ Department for Health Science and Technology. "The three implemented grasping movements are sufficient for lifting objects up to about 500 grams - such as a half-litre water bottle."The exoskeleton is tightened by means of a sensor wristband and is attached to the fingers by means of leather belts. When the patient starts moving the hand, the wristband transmits electromyographic (EMG) signals to a microcomputer. The latter is in a rucksack together with motors, batteries and the control electronics, whereby the rucksack is connected to the hand module. If the wearer intends to make a grasping movement, this is detected by the computer, which then activates the DC motors.
During development, the researchers were confronted with a challenge: the delicate finger joints. These elements not only keep the leaf springs together but also have a filigree locking mechanism for the leather strap. The buckle, into which the strap is threaded, is barely wider than a millimetre. For manufacture of the back of the hand, a 3D printer with an ABS filament was used - the manufacturing method and the material turned out to be unsuitable for the manufacture of finger joints. "The friction between the joints and the leaf springs would have been far too high with this material", says Dittli. "As a result, too much energy would have been lost when the fingers moved. " The resolution of a normal 3D printer turned out not to be high enough to re-create the detailed structure of the finger phalanxes.

iglidur® I6 - the best 3D printing polymer for low-friction applications
The solution to this problem was found to be igus's additive manufacturing system: the self-lubricating SLS material iglidur i6 had been specially developed for the manufacture of parts subject to friction and was used successfully for manufacturing the finger joints. iglidur i6 was originally developed for the manufacture of worm wheels for robot joints. It is ideal for manufacturing components including delicate details with exact surfaces, and is characterised by its outstanding resilience and resistance to abrasion. iglidur i6 proved it suitability as a durable functional component in the igus test laboratory: a sintered gear made of this abrasion-resistant iglidur plastic was tested for two months under the same conditions as a machined gear made of POM. The gear made of POM showed signs of severe wear after321,000 cycles and failed completely after 621,000 cycles, whereas the gear made of iglidur i6 continued to function after 1 million cycles with only small signs of wear.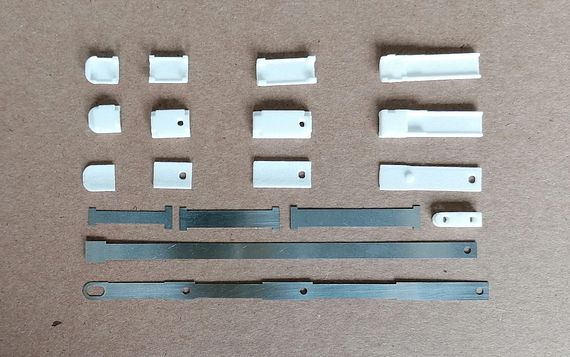
Self-lubricating polymer is ideal for applications in the medical technology sector.
In contrast to metal, iglidur I6 is especially light, as a result of which it is predestined for use in applications where low weight is of central importance. An important advantage for the ETHZ researchers, as only exoskeletons that are light and compact enough are suitable for everyday use. With the finger joints made of iglidur I6, the hand module only weighs 148 grammes. The solid lubricants incorporated in the polymer make external lubrication of the elements superfluous and thus facilitate use of the progressive therapeutic application.Laser sintering as a manufacturing method is not only ideally suited for the replication of complex geometries and filigree structures but also makes it possible to manufacture small volumes and one-off components cost-effectively. This also applies to the RELab tenoexo exoskeletons as they can be individually adapted to the patient. "We have developed an algorithm that enables us to adapt the digital model of the exoskeleton to the size of the patient's hand with just a few clicks of the mouse. "

Fast prototypes or quickly available functional parts?
For product development or functional part manufacture, speed provides companies with market advantages and customers with faster solutions to their problems. By uploading the 3D model of the finger joints needed in our online 3D printing service tool, the ETHZ scientists can order the required parts in just a few minutes. Manufacturing is usually done overnight and the finished finger joints can be fitted after just a few days, then used for therapeutic purposes. No other manufacturing method approaches the speed and cost-effectiveness of 3D printing where customised small volume manufacture is concerned.
But are 3D printed parts suitable as functional parts in the final application, or must they remain in the modest role of quickly available prototypes? We are convinced of the our materials' performance: additively manufactured components made of iglidur® plastics are used in numerous other customer applications as functional series-produced parts.
But are 3D printed parts suitable as functional parts in the final application, or must they remain in the modest role of quickly available prototypes? We are convinced of the our materials' performance: additively manufactured components made of iglidur® plastics are used in numerous other customer applications as functional series-produced parts.
More information on 3D printing
Other application examples for 3D printed components can be found here:
All customer applications at a glance
