Conveyor belt picking - CPR
What was needed:
conveyor belt pick & place robot with camera system
Requirements:
cost-effective and easy to integrate all-in-one solution
Material:
igus room linear robot, igus Robot Control and camera system
Industry:
cosmetics industry
Success for the customer:
coordinated solution without complex integration effort
conveyor belt pick & place robot with camera system
Requirements:
cost-effective and easy to integrate all-in-one solution
Material:
igus room linear robot, igus Robot Control and camera system
Industry:
cosmetics industry
Success for the customer:
coordinated solution without complex integration effort

Go to application
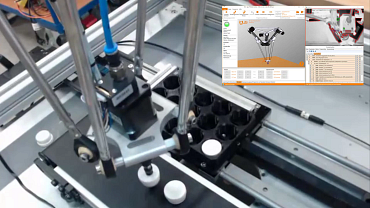
Every conveyor belt (almost) always has a delta robot.In this case, cream jars are sorted into blister packs in the cosmetics industry. A typical pick & place application at the end of the manufacturing process.
The problem
Since the jars are detected depending on their position and have to be rotated, the camera system records both the position on the belt and the position on the head. The system must be able to achieve high speed both in the detection and in the pick & place task.The solution
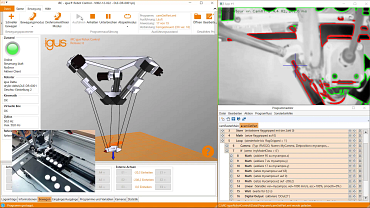
The application consists of a conveyor belt, a 3-axis delta robot, a camera system and the igus Robot Control, which combines all elements in the software and makes an automated pick & place application possible.
Low Cost Automation shop
Cost-effective robotics for your automation project
You can find the right robot for your individual application in our online shop.Browse, get information and order easily.
To the shop
