Educational robots - HTBLuVA Salzburg
What was needed:
easy to control robot arm
Requirements:
cost-effective, modular, precision in the 0.1mm range
Material:
robolink RL-DC-5
Industry:
education/training sector
Success for the customer:
cost-effective robot arm that can be easily integrated into an existing overall concept with third-party control system
easy to control robot arm
Requirements:
cost-effective, modular, precision in the 0.1mm range
Material:
robolink RL-DC-5
Industry:
education/training sector
Success for the customer:
cost-effective robot arm that can be easily integrated into an existing overall concept with third-party control system

Go to application
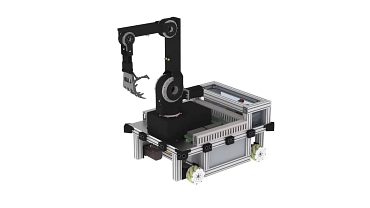
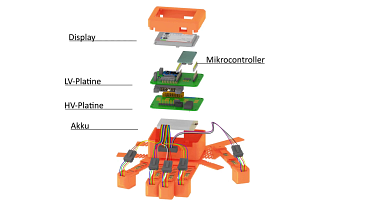
The HTBLuVA Salzburg developed this human-robot collaboration with a gesture/mimic control system as part of an educational project. By using the AGV in combination with the robot arm including "finger grippers", a versatile robot was created.The problem
For projects of this type, exceptionally cost-effective components are required, which, however, have the highest possible interoperability so that various assemblies can interact.Here, both the AGV for movement in workspace and the robot arm including the gripper hand had to be controlled via the haptic glove.
The solution
A cost-effective robolink DC (5-axis model) including B&R motor control technology, in combination with an AGV, a gripper unit and a glove that gives haptic feedback.
The robolink configurator
Discover our online configurator
With our intuitive online configurators, you can create your own robolink articulated arm robot with just a few clicks. Fast, individual and with a fixed price.Discover the unlimited freedom with our tools now.
Go to the configurator

Low Cost Automation shop
Cost-effective robotics for your automation project
You can find the right robot for your individual application in our online shop.Browse, get information and order easily.
To the shop
